Winged Hybrid Airship for Long Endurance
Even as drones surge in the marketplace, they have a bad rep with many people compared to, say automated cars. Cal's Unmanned Aviation Lab seeks a next unmanned aircraft that is friendly and fun to interact rather than be spider-like. Our Winged Hybrid Airship for Long Endurance (WHALE) is such a solution for the rapid urban delivery problem. The design mimics a lovable natural shape while being the outcome of careful aerospace engineering. WHALE is affable in form rather than droid-like, clean air and quiet unlike a flying lawnmower, VTOL, and with scalable endurance. The industry needs Wozniak's electronics in Steve Job's beige box.
WHALE's design is currently proven by XFLO and Simulink analysis, and a first flying prototype has been built. It can deliver 5 lbs with an endurance of 85 miles, while landing in a suburban home is currently viable. We have several innovations such as a wing design allowing for variable lift, minimizing lift and drag in the return phase. This first milestone was achieved with a design budget of $100K, contributed in part by NSF. We seek to execute the next build commercially. A 5X to 10X growth in the design budget will create a 3X to 5X growth in performance and overcome the structural weakness of the current build. For more information, contact Justin Lee at leejustin@berkeley.edu.
Vehicle Design
We focus on designing consumer drones for enhanced interaction
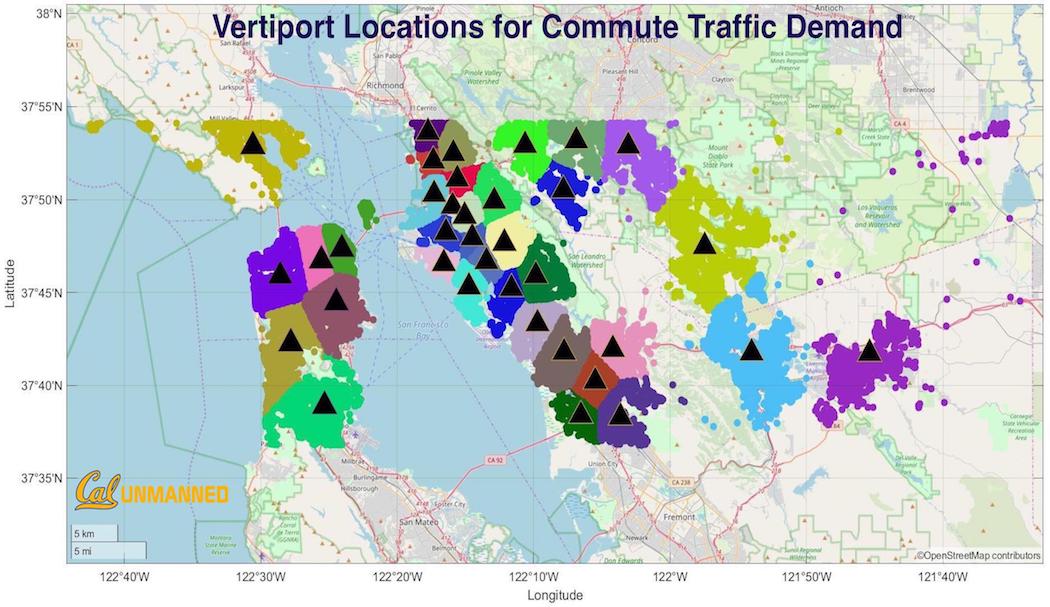
Bimodal Network Design and Demand Estimation
The total addressable market for Advanced Air Mobility (AAM) depeneds on where the gateways to the airspace aka vertiports are located. This will in turn be determined by cost, capacity, travel time, convenience, and other important considerations for travelers. We are developing and testing methods to analyze traffic demand and determine vertiport networks that can sustain the maximum demand possible [1],[2].
UC Berkeley coordinated with NASA to explore AAM’s value under diverse scenarios like different vertiport layouts and aircraft specifications. We developed a cross-platform simulation tool, SimUAM, to evaluate the potential time-saving AAM can bring and its effect on ground transportation and other urban impacts such as land use. This toolchain is made of: (1) MANTA: A fast, high-fidelity regional-scale traffic microsimulator, (2) VertiSim: A granular, discrete-event vertiport and pedestrian simulation, (3) FE3: A high-fidelity, trajectory-based aerial microsimulation. SimUAM, rooted in granular, GPU-based microsimulation, models millions of trips and their exact movements in the street network and in the air, producing interpretable and actionable performance metrics for UAM designs and deployments. Apart from SimUAM, we also propose a hierarchical vertiport network design method that determines vertiport location, aircraft routes, route frequencies, and passenger assignment.
AAM Network Design
We work on air ground interaction problems for multi-modal operations
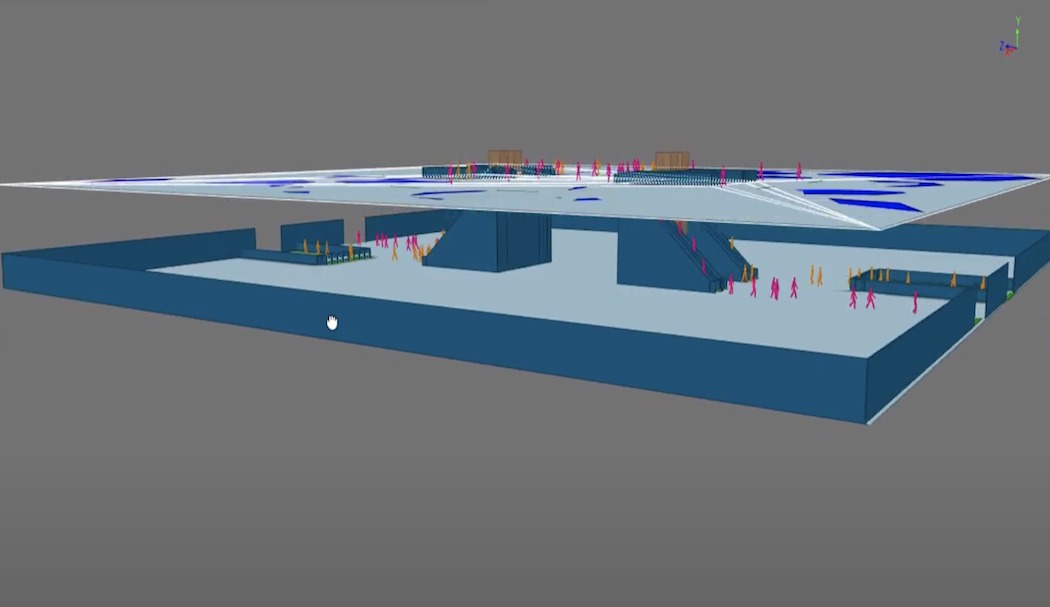
VERTISIM: Agent-based Vertiport Simulation
As an emerging transportation mode, Advanced Air Mobility (AAM) has the potential to change the way people and goods move via electric vertical take-off and landing (eVTOL) aircraft. The initial operations of AAM are expected to be on-demand on a network of vertiports which are going to be transfer hubs of AAM. This emerging transportation system has to work as an aerial ride-sharing system, allowing users to book a trip in the same way they would an Uber ride.
AAM differs from commercial airlines in terms of scheduling, planning, and ground handling. It also varies from urban mobility services due to its relatively complex and longer turnaround process. To address these new problems, we have developed VertiSim, an agent-based discrete-event vertiport simulator capable of modeling passenger arrival processes, aircraft arrival and departure processes, vertiport surface operations including landing, taxi, passenger boarding/deboarding, charging, take-off and all the interactions between these processes. VertiSim simulates AAM operations and computes performance measures such as aircraft turnaround time, passenger waiting time, vertiport throughput, surface and terminal area congestion, and vertiport resource utilization. We can also visualize passenger movements with our MassMotion Vertiport Passenger Simulation.
Vertiport Simulation
We simulate vertiport operations for multi-modal connectivity

The Flying Sensor
This project aims to develop an intelligent platform that can be deployed in the immediate aftermath of a strong earthquake or regular structural health inspection to perform a rapid and objective assessment of structures. We develop a Deep-learning (DL) based detection framework for damage detection(crack), quantification, and annotation as the perceptive function of the system. We trained a Convolutional Neural Network for crack detection and tested the model by inspecting the Wurster Hall at the University of California, Berkeley. The pilot controlled the drone to fly around the Wurster Hall and collected structural images. Based on the images, the CNN model predicted the potential crack location with the confidential score. We extract the detected crack contour and enriched Wurster Hall existing 3D model with damage information. Our other focus is creating an unmanned drone able to autonomously map a structure dangerous for human access by Simultaneous Localization and Mapping (SLAM), which can succeed in GPS denied environments if the structure has well-surveyed components that persist as landmarks. We have implemented Direct Sparse Odometry with Loop closure, a visual SLAM algorithm that can track the robot's trajectory and map the environment online. With the help of the SLAM and damage detection framework, it is possible to navigate the drone to inspect the structure autonomously.
Automated Health Monitoring
We bring mobility and automation to structural damage detection
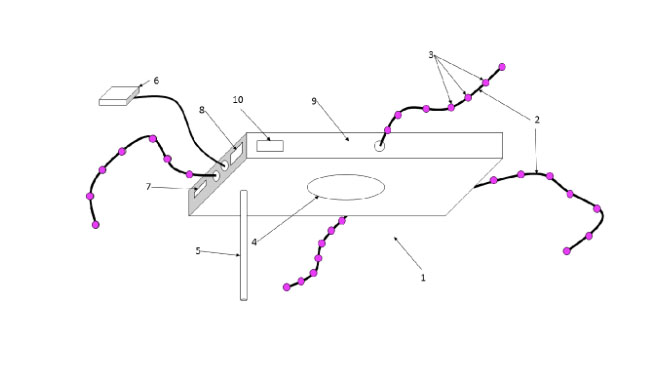
Drone License Plate
Once flights paths have been accepted and airspace permissions have been set, enforcement becomes the next concern. According to Waley (Automobile License Plate for Illinois - 1937), a car license plate is well designed when they have legibility in daylight from at least 125 ft. Similarly, we are creating a drone identification system for low altitude flight, in a way any person can look at the drone for few seconds and detect it at least by 400 ft. The objective is to create a system of traceable identity for UASs. The way we found to make a visible code is using visible LED color sequences for each UAS. This identification technology is integrated with ADS-B, displaying a unique code both through RF and through visible LEDs. With this technology, NASA will have the traceability of the UASs registered to the UTM while they fly, also NASA can easily detect drones that doesn't have the identification system, like a car driving without license plate. Besides the way used to transmit the identification code (LED or RF), we are studying also the size of the code, how many combinations will be available in order to scale up with the growth of the UAS in the airspace. For more information visit www.lightcense.co
UAS Identification System
We develop technologies for regulation of consumer drones

NASA UTM Convention 2015
The NASA Unmanned Aerial Systems (UAS) Traffic Management Convention or UTM 2015 was held from July 28-30 at NASA Ames Research Center at Moffett Field, California. NASA and the Silicon Valley Chapter of AUVSI co-hosted the convention in anticipation of the widespread increase in unmanned aircraft. The three day event attracted a broad international and U.S. audience of government and civilian representatives including leaders from industry and academia. We showcased our research and contributed to discussions geared towards understanding and defining the UAS impact and challenges ahead. The panel speakers, including our lab lead Professor Sengupta, discussed low altitude traffic management with reference to: Policy issues, Emerging markets and operations, Strategies for management and International perspectives. Our current research incorporates the valuable inputs received at the convention.
Technology Outreach
Reaching out to industry experts
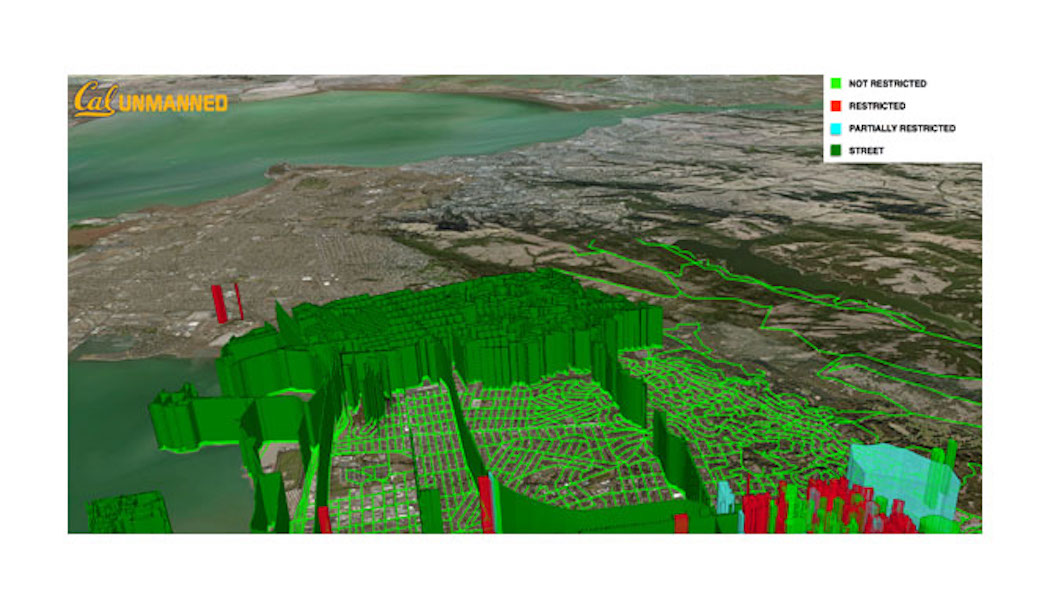
Air Parcel Management System
According to FAA regulations (under the 333 exemptions- ) and laws under discussion drone pilots require the consent of the owner in order to fly over private property. As drone policy proceeds in this direction, regulation of future flights necessitates some form of continued communication between pilots and property owners. To tackle this, we are approaching the problem of regulating low airspace navigation from the land ownership model. A property owner (like an Individual, City or County) may provide full, partial or no restriction for a UAS flying in the air parcel above. The current build of NASA’s UTM system checks new flight paths against existing reserved paths and geofences. If accepted, a polygonal prism of airspace is reserved along the entire flight path for the duration of the flight. Our system breaks up the complexity of checking the large number of flight paths against static (air parcels/geofences) and dynamic (other flights) obstacles into two parallely running platforms. A flight operator inputs the path and it is verified based on the existing air parcel permissions in our air parcel system and if it checks through, it is forwarded to the UTM to be checked against existing flight paths thus ensuring that most of the paths submitted to UTM are acceptable. Secondly, we would be able to retrieve active flight track data from the UTM via WFS requests and update them in real time. Thus even property owners can track which flights are expected to cross their air parcels. There are several research problems in understanding the complexities in this large scale implementation of such a system. Efficient data structures and algorithms are needed in order to check constraints before flight, and in real-time if the flight paths change. At a higher level, this system can be conceptualized as distributing the control of a large scale airspace between consumers and FAA rather than a single centralized source.
Currently the system allows property owners to change permissions for the air parcel above their properties. To explore further visit unmanned.berkeley.edu/airspace
UAS Traffic Management
We are sourcing consumer sentiment towards UAS operations
International Drone Expo
The International Drone Expo is organized annualy by the UAVSA and The Tesla Foundation. The event brings together innovative and talented members of the commercial drone community from around the world. It provides a forum of sorts that allows all attendees, professionals, governments, companies and institutions to interact with each other and the community. At the past two Expos (2014 and 2015), we exhibited the technologies being developed in the lab to the public. We educated the attendees and received valuable feedback from them which we have incorporated in our research.
Public Outreach
Exhibting research and technology to the public